

Robotique
Application robotique mobile Omron LD
Domaine
Centre de distribution – services de préparation de commandes
Mandat
L’objectif du projet consistait à réduire au maximum la perte de temps des préparateurs de commande dans leurs déplacements dans la zone de picking et vers la zone d’emballage
Principaux défis
- Déployer rapidement en prototypage et valider les estimés de gain
- Tester et adapter l’équipement et la stratégie de stationnement et de déplacement dans l’environnement de travail réel
- Déterminer le nombre de robots mobiles et de stations de rechargement requis en phase de déploiement complet
Solutions apportées
- Intégration de robots mobiles autonome OMRON LD-105-CT
- Conception, fabrication et test de chariots nouvelle génération et de leurs stationnements
- Intégration de solutions informatiques Mobile Planner et Enterprise Manager
Manipulation robotisée de crêpe
Domaine
Alimentaire
Mandat
- Cadence de production élevée
- Manipuler simultanément 6 produits sur un convoyeur en mouvement
- Espace de travail limité
Principaux défis
- Déployer rapidement en prototypage et valider les estimés de gain
- Tester et adapter l’équipement et la stratégie de stationnement et de déplacement dans l’environnement de travail réel
- Déterminer le nombre de robots mobiles et de stations de rechargement requis en phase de déploiement complet
Solutions apportées
- Intégration d'un bras robot Stäubli Clean Room
- Conception d'un manipulateur sur-mesure
- Intégration d'un système de vision pour détecter la taille des crêpes
Ligne d’assemblage pour l’industrie automobile
Domaine
Automobile, ligne de production
Mandat
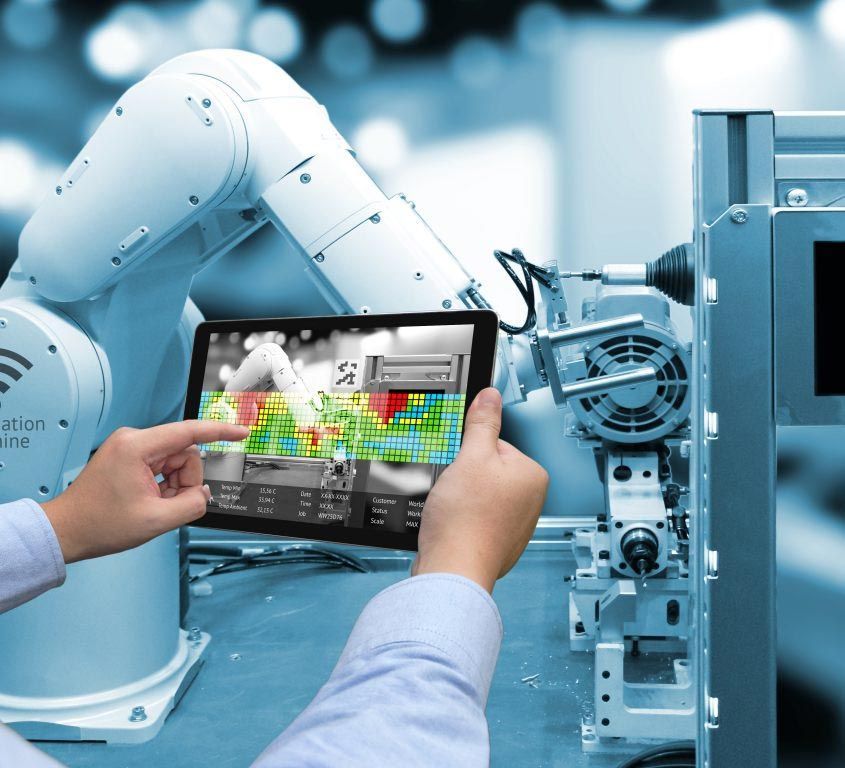
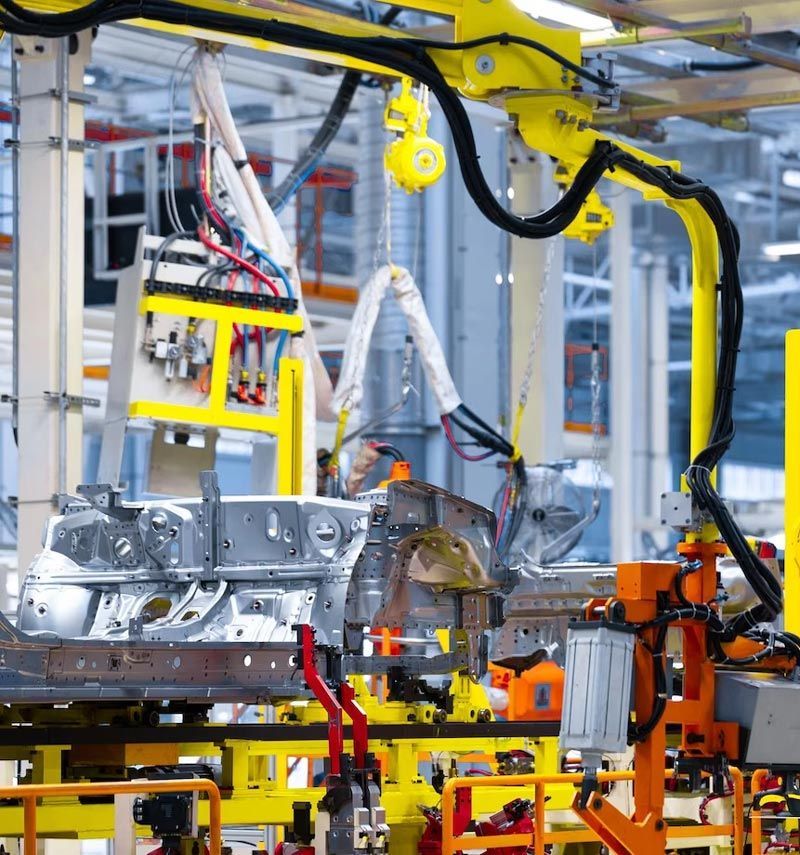
L'objectif du projet consistait à concevoir une ligne d'assemblage et conformage des segments de turbo de voiture sur leur axe.
Principaux défis
- Cadence de production élevée
- Grande précision
- Autonomie de la ligne
- Variété de modèle
Solutions apportées
- Intégration de la CRFM
- Outillage spécifique d'insertion
- Détection par fibre optique
- Chargement et déchargement automatiques
- Convoyeur d'approvisionnement
Chargement de four à trempe
Domaine
Industrie manufacturière
Mandat
L’objectif du projet consistait à effectuer l'alimentation en vitre de verre dans un four à trempe. Le sablage des rebords des verres devaient également être effectué durant le processus de trempe.
Principaux défis
- Intégration de la ligne automatisée dans un environnement restreint
- S’adapter à une vingtaine de dimensions de verres
- Manipuler les vitres de verre sans les briser
- Ne pas laisser de trace résiduelle (éraflures, fissures)
Solutions apportées
- Intégration d'un bras robot Fanuc
- Conception d'un manipulateur sur-mesure
- Développement en partenariat de ventouses sur-mesures
- Système d'identification du centre et des rebords des verres
- Automatisation du déplacement des sableuses
- Formation du personnel au logiciel de programmation
Groupe Claret
Nos Produits